



1. ปุ่มล็อค/เปิดปุ่มกด ( ). สั้นกดเพื่อล็อคปุ่มจากนั้นกดสั้น ๆ เพื่อปลดล็อก กดปุ่มยาว 2 วินาทีเพื่อเปิด/ปิด
). สั้นกดเพื่อล็อคปุ่มจากนั้นกดสั้น ๆ เพื่อปลดล็อก กดปุ่มยาว 2 วินาทีเพื่อเปิด/ปิด
2. ปุ่มสวิตช์/ป้อนการจับคู่ ( ) กดสั้นเพื่อเลือกช่องสุนัข กดยาวเป็นเวลา 3 วินาทีเพื่อเข้าสู่โหมดการจับคู่
) กดสั้นเพื่อเลือกช่องสุนัข กดยาวเป็นเวลา 3 วินาทีเพื่อเข้าสู่โหมดการจับคู่
3. ปุ่มรั้วไร้สาย ( ): กดสั้น ๆ เพื่อป้อน/ออกจากรั้วอิเล็กทรอนิกส์ หมายเหตุ: นี่เป็นฟังก์ชั่นพิเศษสำหรับ X3 ไม่สามารถใช้ได้ใน X1/X2
): กดสั้น ๆ เพื่อป้อน/ออกจากรั้วอิเล็กทรอนิกส์ หมายเหตุ: นี่เป็นฟังก์ชั่นพิเศษสำหรับ X3 ไม่สามารถใช้ได้ใน X1/X2
4. ปุ่มลดระดับการสั่นสะเทือน: ( -
-
5. ปุ่มการจับคู่การสั่นสะเทือน/ออกจากการจับคู่: ( ) กดสั้น ๆ เพื่อสั่นสะเทือนหนึ่งครั้งกดยาวเพื่อสั่น 8 ครั้งและหยุด ในระหว่างการจับคู่โหมดกดปุ่มนี้เพื่อออกจากการจับคู่
) กดสั้น ๆ เพื่อสั่นสะเทือนหนึ่งครั้งกดยาวเพื่อสั่น 8 ครั้งและหยุด ในระหว่างการจับคู่โหมดกดปุ่มนี้เพื่อออกจากการจับคู่
6. ปุ่มจับคู่ช็อต/ลบ ( ): กดสั้น ๆ เพื่อส่งช็อต 1 วินาทีกดยาวเพื่อส่งช็อต 8 วินาทีและหยุด ปล่อยและกดอีกครั้งเพื่อเปิดใช้งานช็อต ในระหว่างโหมดการจับคู่เลือกตัวรับสัญญาณเพื่อลบการจับคู่และกดปุ่มนี้เพื่อลบ
): กดสั้น ๆ เพื่อส่งช็อต 1 วินาทีกดยาวเพื่อส่งช็อต 8 วินาทีและหยุด ปล่อยและกดอีกครั้งเพื่อเปิดใช้งานช็อต ในระหว่างโหมดการจับคู่เลือกตัวรับสัญญาณเพื่อลบการจับคู่และกดปุ่มนี้เพื่อลบ
7. ปุ่มไฟฉาย ( )
)
8. ระดับการช็อต/ระดับรั้วอิเล็กทรอนิกส์เพิ่ม (▲)
9. ปุ่มยืนยันเสียงบี๊บ/การจับคู่ ( ): กดสั้น ๆ เพื่อปล่อยเสียงบี๊บ ในระหว่างโหมดการจับคู่ให้เลือกช่องสุนัขและกดปุ่มนี้เพื่อยืนยันการจับคู่
): กดสั้น ๆ เพื่อปล่อยเสียงบี๊บ ในระหว่างโหมดการจับคู่ให้เลือกช่องสุนัขและกดปุ่มนี้เพื่อยืนยันการจับคู่
10. ปุ่มเพิ่มระดับการสั่นสะเทือน ( -
-
11. ระดับการกระแทกระดับ/ระดับรั้วอิเล็กทรอนิกส์ (ปุ่มลดลง ( )
)

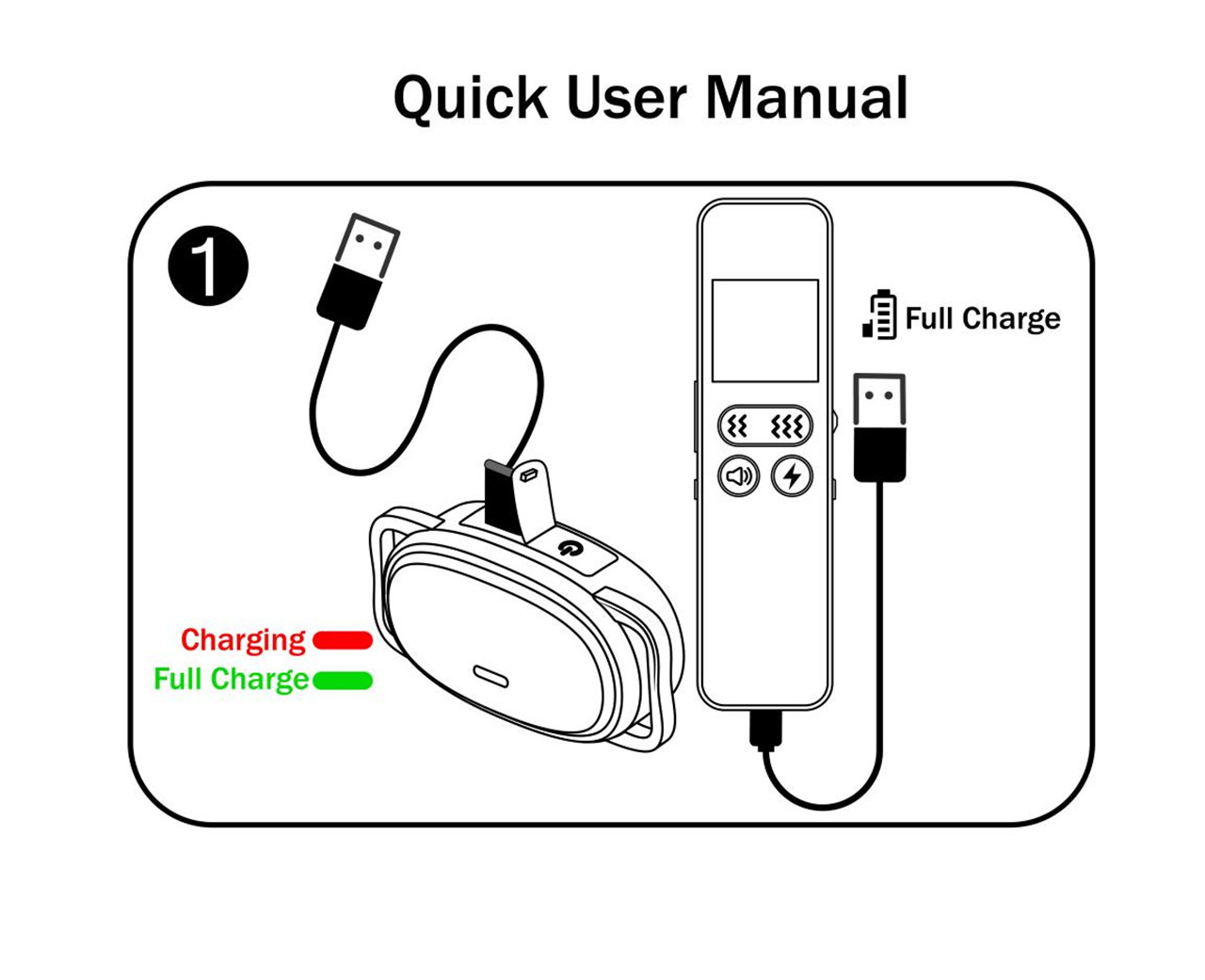
1.การชาร์จ
1.1 ใช้สาย USB ที่รวมอยู่เพื่อชาร์จคอและรีโมทคอนโทรลที่ 5V
1.2 เมื่อการควบคุมระยะไกลถูกชาร์จเต็มจอแสดงผลแบตเตอรี่จะเต็ม
1.3 เมื่อปลอกคอถูกชาร์จเต็มแสงสีแดงจะเปลี่ยนเป็นสีเขียว มันคิดค่าใช้จ่ายอย่างเต็มที่ในเวลาประมาณสองชั่วโมง
1.4 ระดับแบตเตอรี่จะแสดงบนหน้าจอรีโมตคอนโทรล ปก 3 จะปรากฏขึ้น
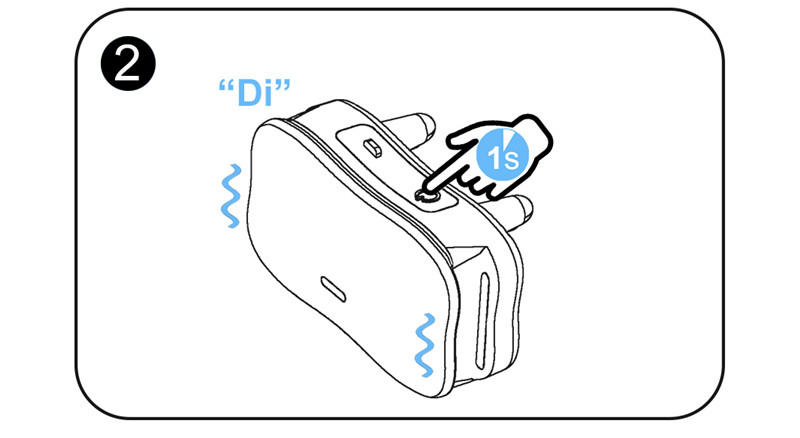
2.Collarเปิด/ปิด
2.1 สั้นกดปุ่มเปิดปิด () เป็นเวลา 1 วินาทีคอจะส่งเสียงบี๊บและสั่นสะเทือนเพื่อเปิด
2.2 หลังจากเปิดใช้งานไฟสีเขียวจะกะพริบหนึ่งครั้งเป็นเวลา 2 วินาทีให้ป้อนสถานะการนอนหลับโดยอัตโนมัติหากไม่ได้ใช้เป็นเวลา 6 นาทีและไฟเขียวจะกะพริบหนึ่งครั้งเป็นเวลา 6 วินาที
2.3 กดค้างไว้ 2 วินาทีเพื่อปิดเครื่อง
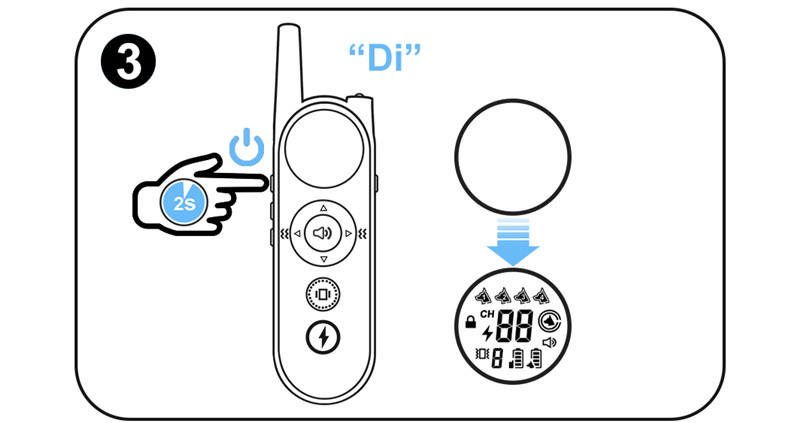
3.เปิด/ปิดการควบคุมระยะไกล
3.1 กดปุ่มยาว () เป็นเวลา 2 วินาทีในการเปิด/ปิด จะมีการส่งเสียงบี๊บและหน้าจอจะสว่างขึ้น
3.2 กดปุ่มยาว () เป็นเวลา 2 วินาทีจะได้ยินเสียงบี๊บและจอแสดงผลจะปิด
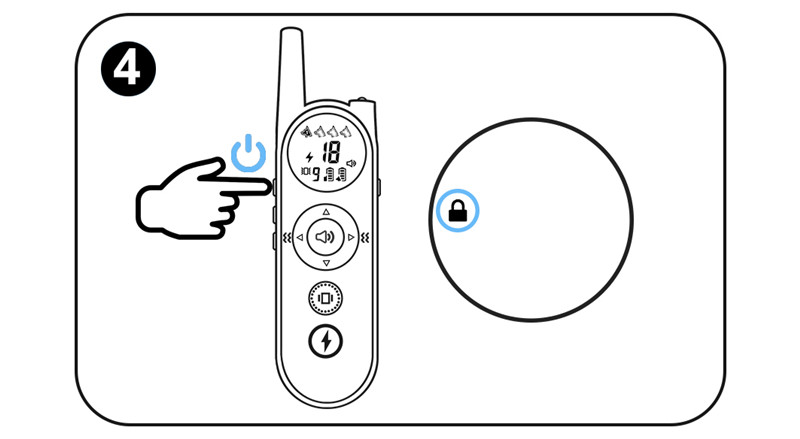
4.ล็อคแป้นพิมพ์
4.1 กดสั้นเพื่อล็อคปุ่ม () จากนั้นกดสั้น ๆ เพื่อปลดล็อก
4.2 แนะนำให้ล็อคปุ่มเมื่อไม่ได้ใช้งานเพื่อป้องกันการใช้ในทางที่ผิด
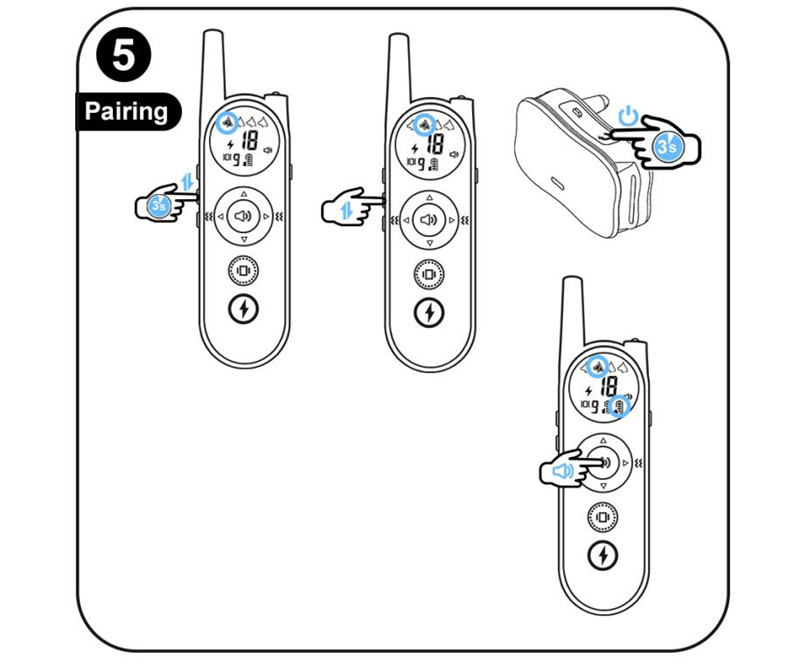
5.การจับคู่(คู่หนึ่งต่อหนึ่งได้รับการจับคู่ในโรงงานคุณสามารถใช้มันได้โดยตรง)
5.1 ในสถานะการเปิดเครื่องควบคุมระยะไกลกดปุ่มสวิตช์ช่องสัญญาณระยะยาว () เป็นเวลา 3 วินาทีจนกระทั่งไอคอนเริ่มกระพริบและตัวควบคุมระยะไกลเข้าสู่โหมดการจับคู่
5.2 จากนั้นกดปุ่มนี้สั้น ๆ () ในการเลือกตัวรับสัญญาณที่คุณต้องการจับคู่กับ (ไอคอนกะพริบระบุว่าอยู่ในโหมดการจับคู่) ดำเนินการตั้งค่าตัวรับสัญญาณ
5.3 หากต้องการใส่ตัวรับสัญญาณในโหมดการจับคู่ในขณะที่เปิดใช้งานให้กดปุ่มเปิดปิดใช้เวลานาน 3 วินาทีจนกว่าคุณจะเห็นไฟแสดงสถานะกระพริบสีแดงและสีเขียว ปล่อยปุ่มและตัวรับสัญญาณจะเข้าสู่โหมดการจับคู่ หมายเหตุ: โหมดการจับคู่ของตัวรับสัญญาณทำงานเป็นเวลา 30 วินาที หากเกินเวลาคุณจะต้องปิดและลองใหม่
5.4 กดปุ่มคำสั่งเสียงบนรีโมตคอนโทรลเลอร์ () เพื่อยืนยันการจับคู่ มันจะปล่อยเสียงบี๊บเพื่อระบุการจับคู่ที่ประสบความสำเร็จ
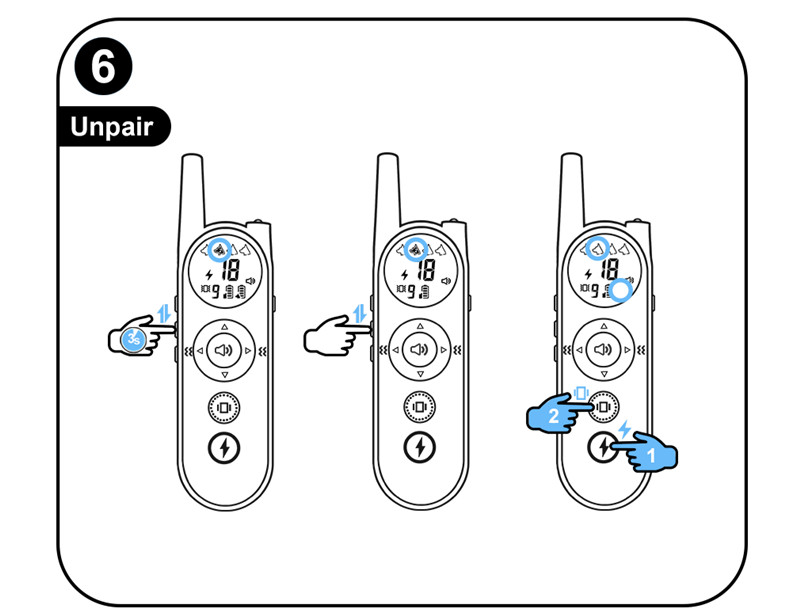
6. ยกเลิกการจับคู่
6.1 กดปุ่มสวิตช์ช่องยาว ( ) บนตัวควบคุมระยะไกลเป็นเวลา 3 วินาทีจนกระทั่งไอคอนเริ่มกระพริบ จากนั้นกดปุ่มสวิตช์สั้น ๆ () ในการเลือกตัวรับสัญญาณที่คุณต้องการยกเลิกการจับคู่ด้วย
) บนตัวควบคุมระยะไกลเป็นเวลา 3 วินาทีจนกระทั่งไอคอนเริ่มกระพริบ จากนั้นกดปุ่มสวิตช์สั้น ๆ () ในการเลือกตัวรับสัญญาณที่คุณต้องการยกเลิกการจับคู่ด้วย
6.2 สั้นกดปุ่มช็อต () เพื่อลบการจับคู่จากนั้นกดปุ่มการสั่นสะเทือน () เพื่อออกจากโหมดการจับคู่
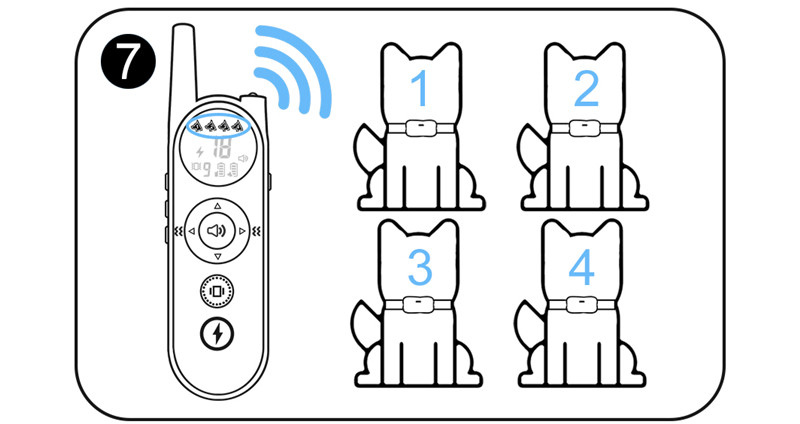
7.จับคู่กับหลาย ๆปลอกคอs
ทำซ้ำการดำเนินการข้างต้นคุณสามารถจับคู่ปลอกคออื่น ๆ ได้
7.1 ช่องหนึ่งช่องมีหนึ่งปลอกคอและปลอกคอหลายช่องไม่สามารถเชื่อมต่อกับช่องเดียวกันได้
7.2 หลังจากจับคู่ทั้งสี่ช่องแล้วคุณสามารถกดปุ่มสวิตช์ช่อง () ในการเลือก 1 ถึง 4 ช่องทางเพื่อควบคุมปลอกคอเดี่ยวหรือควบคุมปลอกคอทั้งหมดในเวลาเดียวกัน
7.3 ระดับการสั่นสะเทือนและการกระแทกสามารถปรับเป็นรายบุคคลได้เมื่อควบคุมคอปกเดียวฟังก์ชั่นทั้งหมดจะพร้อมใช้งาน
7.4 หมายเหตุพิเศษ: เมื่อควบคุมปลอกคอหลายตัวในเวลาเดียวกันระดับการสั่นสะเทือนจะเหมือนกันและฟังก์ชั่นการช็อตไฟฟ้าจะถูกปิด (รุ่น X1/X2) ฟังก์ชั่นช็อตไฟฟ้าที่ระดับ 1 (รุ่น X3)
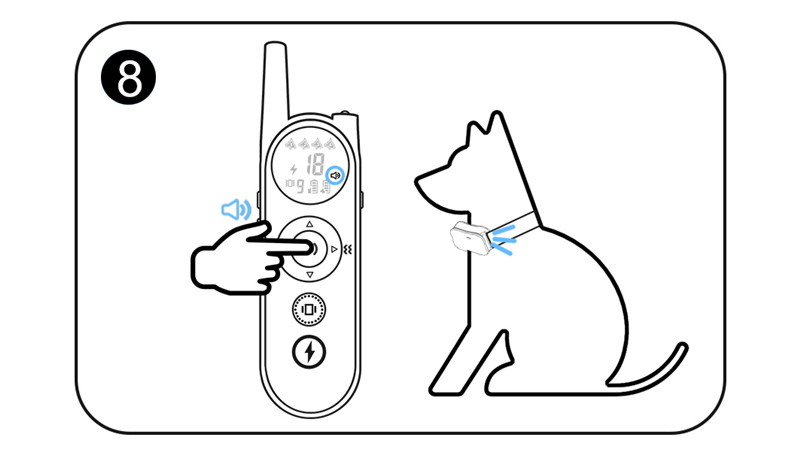
8.คำสั่งเสียงบี๊บ
8.1 การกดสั้น () ปุ่มบนตัวควบคุมระยะไกลและตัวรับสัญญาณจะส่งเสียงบี๊บ
8.2 กดยาว () ปุ่มและตัวรับสัญญาณจะปล่อยเสียงอย่างต่อเนื่อง
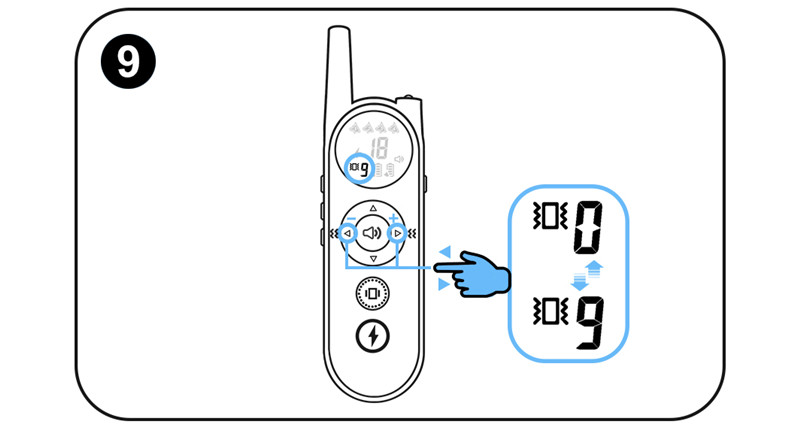
9.การปรับความเข้มการสั่นสะเทือน
9.1 กดปุ่มลดระดับการสั่นสะเทือน () และระดับการสั่นสะเทือนจะลดลงจากระดับ 9 ถึงระดับ 0
9.2 กดปุ่มเพิ่มระดับการสั่นสะเทือน () และระดับการสั่นสะเทือนจะเพิ่มขึ้นจากระดับ 0 เป็นระดับ 9
9.3 ระดับ 0 หมายถึงไม่มีการสั่นสะเทือนและระดับ 9 คือการสั่นสะเทือนที่แข็งแกร่งที่สุด
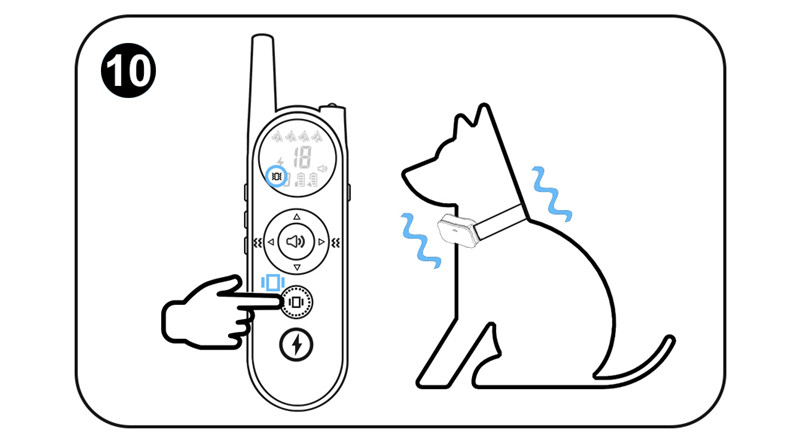
10.คำสั่งการสั่นสะเทือน
10.1 สั้นกดปุ่มการสั่นสะเทือน () และปลอกคอจะสั่นสะเทือนหนึ่งครั้ง
10.2 กดปุ่มการสั่นสะเทือนยาว () ปลอกคอจะสั่นอย่างต่อเนื่องและจะหยุดหลังจาก 8 วินาที
10.3 เมื่อควบคุมปลอกคอหลายตัวในเวลาเดียวกันระดับการสั่นสะเทือนคือค่าชุดปัจจุบัน
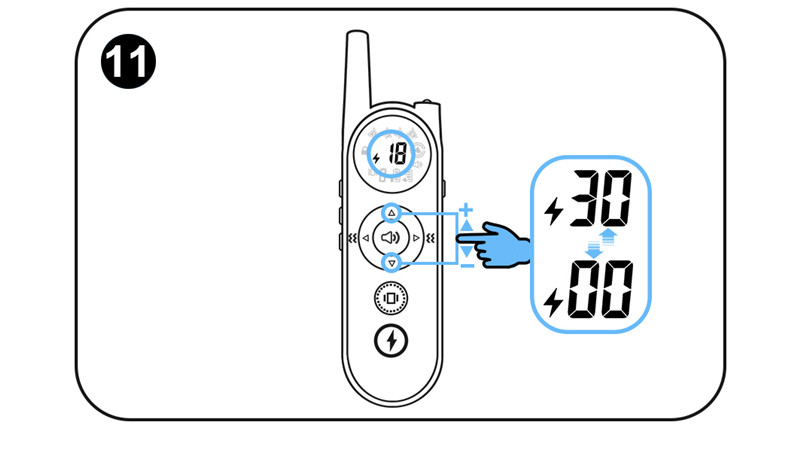
11.การปรับความเข้มของการกระแทก
11.1 กดปุ่มเพิ่มระดับการกระแทก (▲) บนตัวควบคุมระยะไกลและระดับการกระแทกจะเพิ่มขึ้นจากระดับ 0 เป็นระดับ 30
11.2 กดปุ่มลดระดับการกระแทก () บนตัวควบคุมระยะไกลและระดับการกระแทกจะลดลงจากระดับ 30 ถึงระดับ 0
11.3 ระดับ 0 หมายถึงการไม่ตกใจและระดับ 30 เป็นความตกใจที่แข็งแกร่งที่สุด
11.4 ขอแนะนำให้เริ่มฝึกสุนัขในระดับ 1 และสังเกตปฏิกิริยาของสุนัขก่อนที่จะค่อยๆเพิ่มความเข้ม
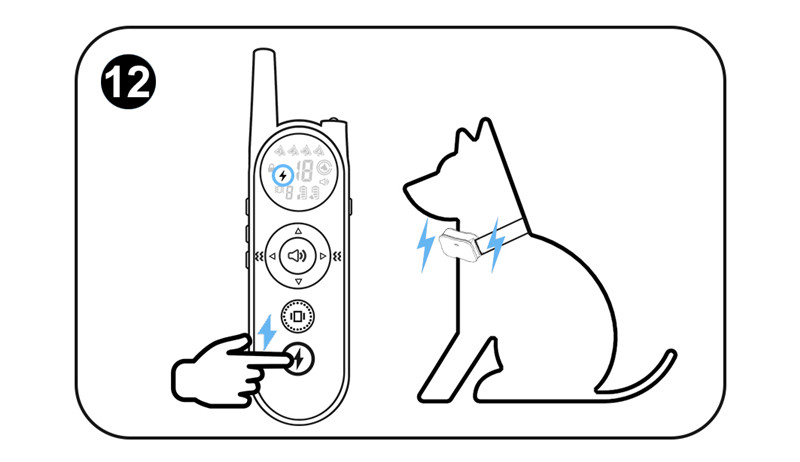
12.คำสั่งช็อต
12.1 สั้นกดปุ่มช็อตไฟฟ้า () และจะมีไฟฟ้าช็อตเป็นเวลาหนึ่งวินาที
12.2 กดปุ่มช็อตไฟฟ้ายาว () และไฟฟ้าช็อตจะหยุดหลังจาก 8 วินาที
12.3 ปล่อยปุ่มช็อตแล้วกดปุ่มช็อตอีกครั้งเพื่อเปิดใช้งานการกระแทก
13. Eฟังก์ชั่นรั้ว lectronic (รุ่น x3 เท่านั้น).
ช่วยให้คุณสามารถกำหนดระยะทางให้สุนัขของคุณท่องไปได้อย่างอิสระและให้คำเตือนอัตโนมัติหากสุนัขของคุณเกินขีด จำกัด นี้ นี่คือคำแนะนำเกี่ยวกับวิธีการใช้ฟังก์ชั่นนี้:
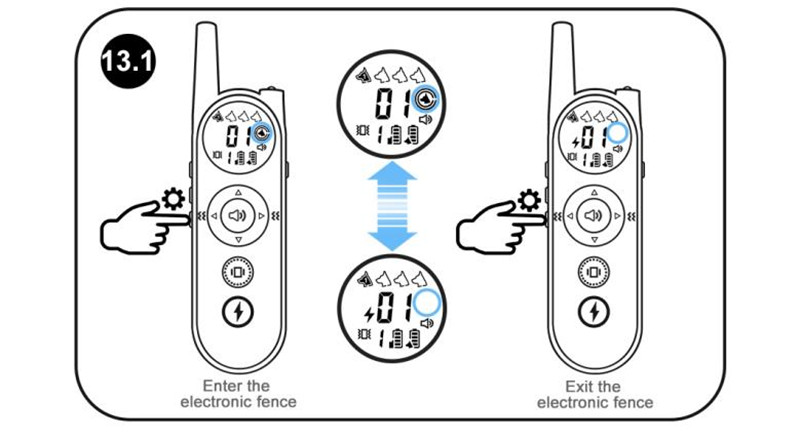
13.1 ในการเข้าสู่โหมดรั้วอิเล็กทรอนิกส์: กดปุ่ม Select Function) ไอคอนรั้วอิเล็กทรอนิกส์จะแสดง ( -
-
13.2 เพื่อออกจากโหมดรั้วอิเล็กทรอนิกส์: กดปุ่มเลือกฟังก์ชั่น () อีกครั้ง. ไอคอนรั้วอิเล็กทรอนิกส์จะหายไป (-
เคล็ดลับ: เมื่อไม่ได้ใช้ฟังก์ชั่นรั้วอิเล็กทรอนิกส์ขอแนะนำให้ออกจากฟังก์ชั่นรั้วอิเล็กทรอนิกส์เพื่อประหยัดพลังงาน
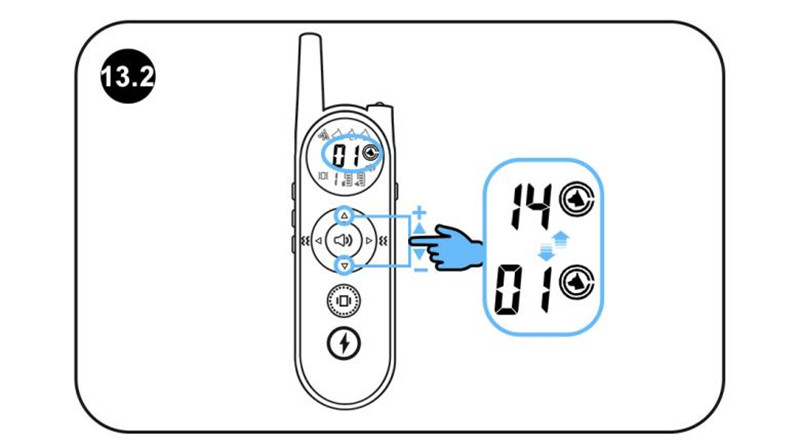
13.2.ปรับระยะทางระดับ:
ในการปรับระยะรั้วอิเล็กทรอนิกส์: ในขณะที่อยู่ในโหมดรั้วอิเล็กทรอนิกส์ให้กดปุ่ม (▲) ระดับรั้วอิเล็กทรอนิกส์จะเพิ่มขึ้นจากระดับ 1 เป็นระดับ 14 กด () ปุ่มเพื่อลดระดับรั้วอิเล็กทรอนิกส์จากระดับ 14 ถึงระดับ 1
13.3.ระดับระยะทาง:
ตารางต่อไปนี้แสดงระยะทางเป็นเมตรและฟุตสำหรับแต่ละระดับของรั้วอิเล็กทรอนิกส์
| ระดับ | ระยะทาง (เมตร) | ระยะทาง (ฟุต) |
| 1 | 8 | 25 |
| 2 | 15 | 50 |
| 3 | 30 | 100 |
| 4 | 45 | 150 |
| 5 | 60 | 200 |
| 6 | 75 | 250 |
| 7 | 90 | 300 |
| 8 | 105 | 350 |
| 9 | 120 | 400 |
| 10 | 135 | 450 |
| 11 | 150 | 500 |
| 12 | 240 | 800 |
| 13 | 300 | 1,000 |
| 14 | 1050 | 3500 |
ระดับระยะทางที่มีให้ขึ้นอยู่กับการวัดที่ใช้ในพื้นที่เปิดและมีวัตถุประสงค์เพื่อวัตถุประสงค์ในการอ้างอิงเท่านั้น เนื่องจากการเปลี่ยนแปลงในสภาพแวดล้อมโดยรอบระยะทางที่มีประสิทธิภาพจริงอาจแตกต่างกันไป
13.4 การดำเนินการที่ตั้งไว้ล่วงหน้า (รีโมตคอนโทรลเลอร์สามารถทำงานในโหมดรั้วได้):ก่อนเข้าสู่โหมดรั้วคุณต้องตั้งค่าระดับดังนี้:
13.4.1 สำหรับสุนัข 1 ตัว: สามารถตั้งค่าทั้งการสั่นสะเทือนและระดับช็อต
13.4.2 สำหรับสุนัข 2-4 ตัว: ต้องตั้งค่าระดับการสั่นสะเทือนเท่านั้นและไม่สามารถปรับระดับการกระแทกได้ (ยังคงอยู่ที่ระดับ 1 โดยค่าเริ่มต้น)
13.4.3 หลังจากตั้งค่าระดับการสั่นสะเทือนคุณต้องกดปุ่มการสั่นสะเทือนบนรีโมตคอนโทรลเลอร์หนึ่งครั้งเพื่อบันทึกการตั้งค่าก่อนเข้าสู่โหมดรั้วอิเล็กทรอนิกส์ ในโหมดรั้วอิเล็กทรอนิกส์คุณไม่สามารถตั้งค่าการสั่นสะเทือนและระดับช็อตได้
ในขณะที่อยู่ในโหมดรั้วอิเล็กทรอนิกส์คุณสามารถใช้ฟังก์ชั่นการฝึกอบรมทั้งหมดของตัวควบคุมระยะไกลรวมถึงเสียงการสั่นสะเทือนและการกระแทก ฟังก์ชั่นเหล่านี้จะส่งผลกระทบต่อปลอกคอทั้งหมดภายในรั้วอิเล็กทรอนิกส์ เมื่อควบคุมสุนัขหลายตัวคำเตือนการช็อตอัตโนมัติสำหรับการไปไกลกว่าช่วงจะถูกปิดใช้งานโดยค่าเริ่มต้นและระดับช็อตด้วยตนเองถูกตั้งค่าเป็น 1 โดยค่าเริ่มต้น
| สถานะระดับในโหมดรั้วอิเล็กทรอนิกส์/โหมดการฝึกอบรม | ||||
| ปริมาณควบคุม | สุนัข 1 ตัว | สุนัข 2 ตัว | สุนัข 3 ตัว | สุนัข 4 ตัว |
| ระดับการสั่นสะเทือน | ระดับล่วงหน้า | ระดับก่อนกำหนด (สุนัขทุกตัวอยู่ในระดับเดียวกัน) | ระดับก่อนกำหนด (สุนัขทุกตัวอยู่ในระดับเดียวกัน) | ระดับก่อนกำหนด (สุนัขทุกตัวอยู่ในระดับเดียวกัน) |
| ระดับช็อต | ระดับล่วงหน้า | ระดับเริ่มต้น 1 (ไม่สามารถเปลี่ยนแปลงได้) | ระดับเริ่มต้น 1 (ไม่สามารถเปลี่ยนแปลงได้) | ระดับเริ่มต้น 1 (ไม่สามารถเปลี่ยนแปลงได้) |
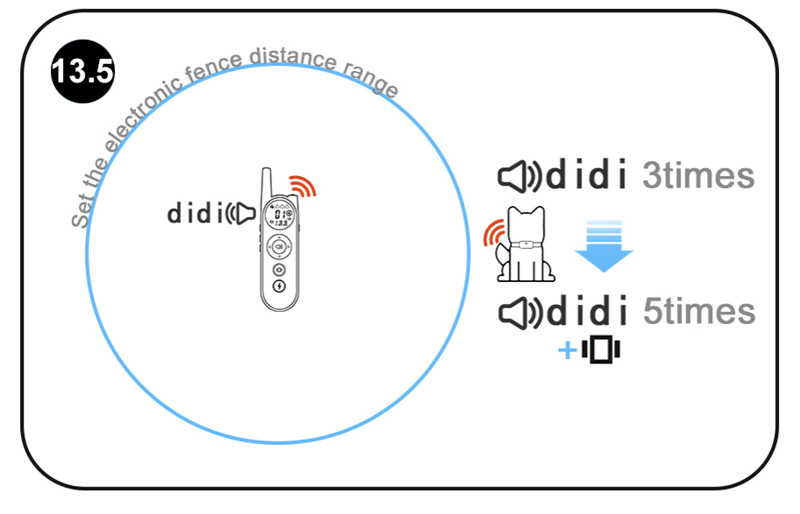
13.5.ฟังก์ชั่นเตือนอัตโนมัติ:
เมื่อปลอกคอเกินขีด จำกัด ระยะทางจะมีคำเตือน การควบคุมระยะไกลจะปล่อยเสียงบี๊บจนกว่าสุนัขจะกลับไปที่ขีด จำกัด ระยะทางและปลอกคอจะปล่อยเสียงบี๊บสามครั้งโดยอัตโนมัติแต่ละครั้งมีช่วงเวลาหนึ่งวินาที หากสุนัขยังคงไม่กลับไปที่ระยะทางหลังจากนี้ปลอกคอจะปล่อยเสียงบี๊บห้าครั้งและคำเตือนการสั่นสะเทือนแต่ละอันมีช่วงเวลาห้าวินาทีจากนั้นปลอกคอจะหยุดเตือน ฟังก์ชั่นช็อตถูกปิดโดยค่าเริ่มต้นในระหว่างการเตือนอัตโนมัติ ระดับการสั่นสะเทือนเริ่มต้นคือ 5 ซึ่งสามารถกำหนดไว้ล่วงหน้าได้
13.6.notes:
-เมื่อสุนัขเกินขีด จำกัด ระยะทางปลอกคอจะเป็นแปดคำเตือนทั้งหมด (เสียงบี๊บ 3 เสียงและเสียงบี๊บ 5 เสียงที่มีการสั่นสะเทือน) ตามด้วยคำเตือนรอบอื่นหากสุนัขเกินขีด จำกัด ระยะทางอีกครั้ง
-ฟังก์ชั่นการเตือนอัตโนมัติไม่รวมฟังก์ชั่นการช็อกเพื่อความปลอดภัยของสุนัข หากคุณต้องการใช้ฟังก์ชั่นช็อตคุณสามารถใช้งานได้ด้วยตนเองโดยใช้รีโมทควบคุม หากฟังก์ชั่นการเตือนอัตโนมัติไม่ได้ผลสำหรับการควบคุมสุนัขหลายตัวคุณสามารถออกจากโหมดรั้วอิเล็กทรอนิกส์และเลือกปลอกคอเฉพาะเพื่อออกคำเตือนเสียง/การสั่นสะเทือน/การสั่นสะเทือน หากควบคุมสุนัขเพียงตัวเดียวคุณสามารถใช้งานฟังก์ชั่นการฝึกอบรมโดยตรงในการควบคุมระยะไกลสำหรับการเตือน
13.7. เคล็ดลับ:
-ออกจากโหมดรั้วอิเล็กทรอนิกส์เสมอเมื่อไม่ได้ใช้เพื่อประหยัดอายุการใช้งานแบตเตอรี่
-ขอแนะนำให้ใช้ฟังก์ชั่นการสั่นสะเทือนก่อนใช้ฟังก์ชั่นช็อตในระหว่างการฝึกอบรม
-เมื่อใช้ฟังก์ชั่นรั้วอิเล็กทรอนิกส์ตรวจสอบให้แน่ใจว่าปลอกคอติดตั้งสุนัขของคุณอย่างเหมาะสมเพื่อประสิทธิภาพที่ดีที่สุด
เวลาโพสต์: ตุลาคม-20-2023





